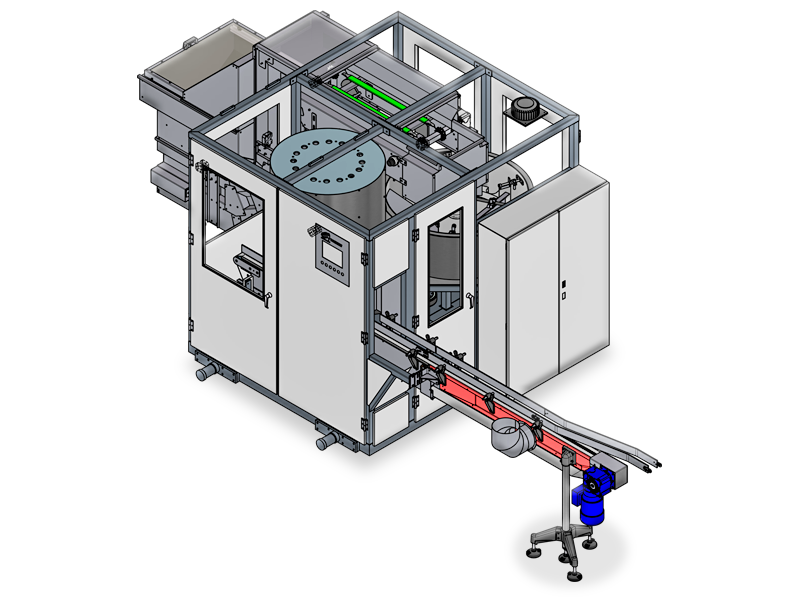
Posibot 设计用于处理各种类型的容器和其他不同几何形状的物体,特别是那些底部和高度设计非常相似的物体。
它配备了一个吸盘系统,可以在 0º 到 360º 之间旋转容器或物体,并将其轻柔地放置在输出输送带上,自动且无压力。
格式更改通过手动更换格式部件来完成,无需调整或使用工具,时间少于 5 分钟,并且无需合格人员参与。
该型号特别设计为完全自动运行,无需操作员持续负责。
手动换型